Why we need to guide?
Because mount mechanics are of limited accuracy, and once this accuracy is lower than our imaging setup resolution we need to guide. There are some mounts available equipped with high resolution encoders and software that are capable to create a map of sky and setup flexures, but it comes for a price. Many amateur mounts are just german equatorial mounts with worm gearbox, and even high quality mounts of this type will require guiding for long exposures imaging at high pixel scale. There are two main ways of guiding, that I described in another article.
What are tracking error sources?
There are several things to consider:
Polar alignment. Bad polar alignment will cause drift and field rotation that needs to be compensated with guiding. However doing polar alignment with insane precision is not always good approach when you use guiding. Due to usual backlash in declination axis it is sometimes good to have a little bit misalignment here, so corrections in declination axis will be always done in one direction, and backlash does not need to be compensated. When you shot exposures without guiding (like widefields for example), then you may want to do polar alignment quite precise. For guided images we should aim for polar alignment not worse than 3-4 arc minutes.
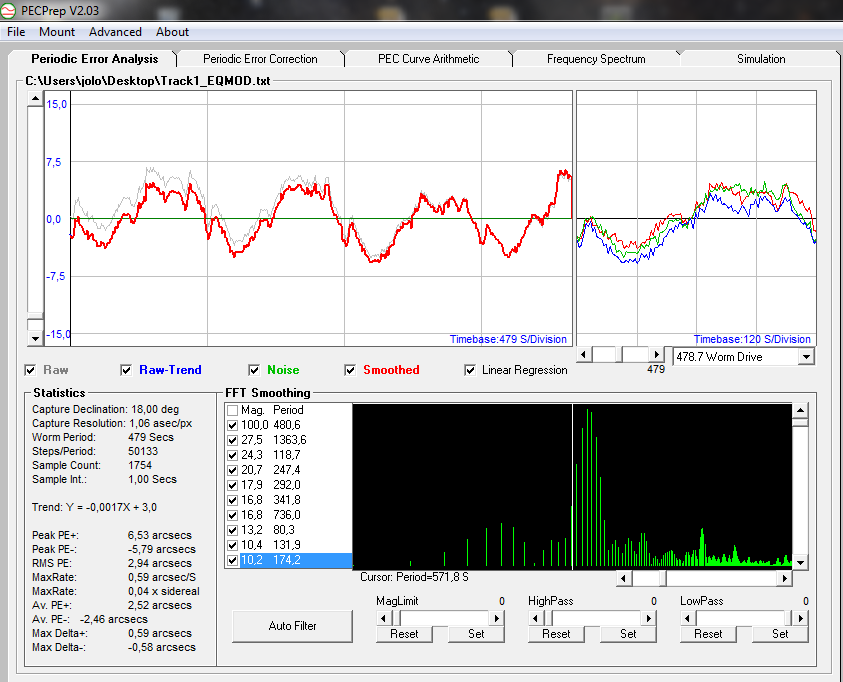
Periodic error. This one is intrinsic quality of worm gearbox. Inaccuracy of this gearbox causes tracking rate to change a little in a repeatable way with the period equal to rotation period of the worm. To fight periodic error back we need to use guiding and/or apply periodic error curve (PEC) compensation. We can apply the compensation, because this error is periodic, so we can record the way how it changes and then apply corrections in advance. Periodic error in good quality mounts is low (less than 5″), and in low budget mounts can be quite high (like 20″ or more). However periodic error itself is not disaster. What we need to look for is high slopes of the periodic error curve. These places will require large corrections and we need to make sure that guiding rate will be large enough.
Other mount tracking errors. Periodic error is only one of the tracking error component. Each gear will introduce some error to the mount tracking. These other errors may appear as periodic errors with different periods or some higher frequency (0.5-5s) errors caused by roughness of gear mesh surfaces. This high frequency random errors cannot usually be corrected by guiding or PEC, and its amplitude determines guiding accuracy.
Wind gusts. There is not much that we can do about it. How the setup reacts to wind depends on its size and mount rigidity. We should not guide wind.
How much guiding error is good enough?
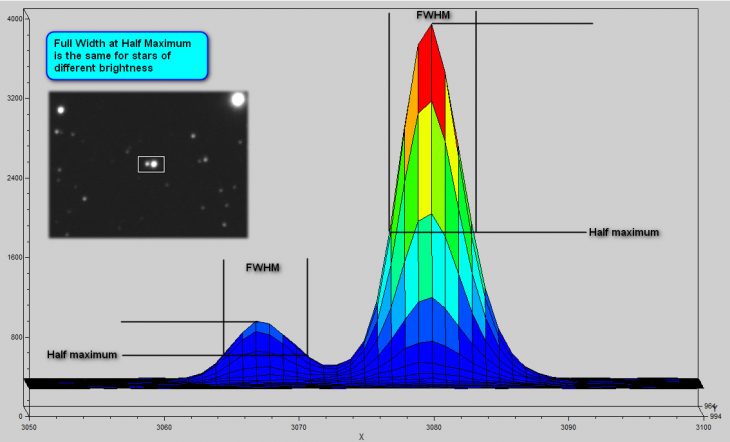
There are few factors that determine size of the star in the final image. Star diameter is usually expressed as FWHM (Full Width at Half Maximum). FWHM is convenient star size measure, because it does not depend on star brightness (another star size measure is HFD – Half Flux Diameter). Since stars are at extreme distances apparent star diameter is very small (less than 0.1″ for largest and closest stars). But star diameter at the recorded image is much larger. There are three main reasons for that.
Optical resolution of the telescope. We can estimate it with the expression:
FWHMotpics [arc sec] = 130 / aperture [mm]
So for telescope with aperture 130mm its resolution will be 1″.
Earth seeing limit. It can be estimated with:
FWHMseeing [arc sec] = 140/ r0 [mm]
where r0 is so called Fried’s parameter which is a measure of the quality of optical transmission through the atmosphere. Its typical values are between 50 and 200mm, and for the best locations it can be as high as 400mm. Average value for amateur sites is usually about 60-70mm, and that corresponds to resolution about 2″.
Tracking error. This error is usually anisotropic value (it can be different in different directions), so stars at the image is usually elongated in RA direction. Tracking error is a value that can in most cases be directly read from guiding software (like MaxIm od PHD2) for each axis separately as RMS value. Then total RMS tracking error will be given by:
FWHMtracking [arc sec] = ( RMSx 2 + RMSy 2 ) 1/2
So for example if we have tracking error 0.5″ in y axis and 0.8″ in x axis, total tracking error will be 0.94″. And the roundness of stars will be given by:
RND = Abs((xsize - ysize) / (xsize + ysize))
So for our example RND will be equal to 23%. RND equal or less than 10-15% are usually not perceptible by most people.
Mount motor resolution. It can be read from specifications, but this component is rarely a limiting factor. For EQ6/HEQ5 class mount motor resolution is 0.14 arc sec and for EQ3-2 it is 0.28 arc sec. For EQ8 mount it is 0.11 arc sec, and for iOptron CEM60 it is 0.06 arc sec.
The final FWHM of the star at the frame will consist with all these components. It will be given by the expression:
FWHM = (FWHMoptics 2 + FWHMseeing 2 + FWHMtracking 2) 1/2
As you can see star FWHM consists of several components (but it is not the simple sum), and usually there is one limiting component that affects final FHWM the most.
Example 1
Let’s have a system of 200mm newtonian, EQ6 mount at average amateur location. We have then following errors:
FWHM optics = 0.65" FWHM seeing = 2.5" FHWM tracking = 1"
It is easily to see that seeing is the most limiting factor for this setup. Final FWHM of the star can be at level of 2.8″. If we could place this setup at location with 1.5″ seeing, than we should consider having better quality mount.
Example 2
Let’s have a system of 80mm APO triplet, Takahashi EM10 mount at high quality location. We have then following errors:
FWHM optics = 1.63" FWHM seeing = 1" FWHM tracking = 0.5"
Now optics is limiting factor. Both mount and location is capable to provide excellent images, but even perfect 80mm optics will be diffraction limited to 1.63″ and the final star FWHM will be 2.0″. If we could use 120mm telescope, then star FWHM would drop to 1.55″. In this latter case both seeing and optics would affect the final FWHM in the same extent.

Conclusion
So, in example 1 seeing was limiting factor, and in second example it was telescope optics. As in many amateur locations average seeing is at level of 2-2.5″ (for long exposure imaging), it is usually the seeing that is the dominant component of total star size. If your telescope has aperture 80mm or less, then also optics resolution will influence final star image size quite much. Speaking of mounts – even entry level amateur mounts like HEQ5 or EQ6 have total RMS tracking error 1″ or less (assuming they are well adjusted and not damaged). And there will be rare cases, when tracking error will be limiting factor for total setup resolution. Once you know that your location often offers nights with seeing 1.5″ or better, then it is reasonable to invest in better quality mount, that will provide tracking error 0.5″ or better.
How to get the best from your mount?
- don’t overload it. For imaging with the mount of questionable specifications it is better not to put more than 60-70% of the load.
- protect from strong winds. There is really not much more you can do.
- have it well adjusted. Total backlash elimination is not crucial, but dirty gears will definitely not work well.
- eliminate differential flexures between guiding and main imaging train. This flexures cannot be corrected with guiding (unless you use OAG)
- have proper guiding scope and camera. Short achromatic guidescopes often create large, bloated star images, that are not perfect for guiding. Using Fringe Killer or Semi APO filters may help in this case.
- adjust guiding software parameters to your setup and conditions. Guide corrections should not be made for each guide camera exposure, no more often than 1 correction for each 2-3 guider cycles.
- do not use guider exposure time shorter than 1 second, otherwise you start to guide seeing fluctuations.
- maximum exposure time for guider will be determined by periodic error of your mount. The less this error is, the longer exposure you can use.
Clear skies!

